凸包
二维凸包
定义
凸多边形
凸多边形是指所有内角大小都在 [0,𝜋] 范围内的 简单多边形.
范围内的 简单多边形.
凸包
在平面上能包含所有给定点的最小凸多边形叫做凸包.
其定义为:对于给定集合 𝑋,所有包含 𝑋 的凸集的交集 𝑆 被称为 𝑋 的 凸包.
实际上可以理解为用一个橡皮筋包含住所有给定点的形态.
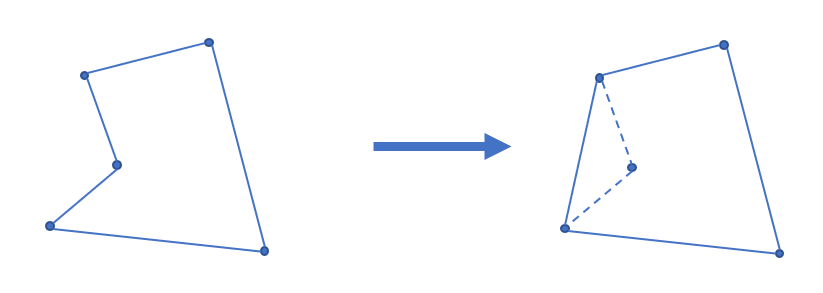
凸包用最小的周长围住了给定的所有点.如果一个凹多边形围住了所有的点,它的周长一定不是最小,如下图.根据三角不等式,凸多边形在周长上一定是最优的.
Andrew 算法求凸包
常用的求法有 Graham 扫描法和 Andrew 算法,这里主要介绍 Andrew 算法.
性质
该算法的时间复杂度为 𝑂(𝑛log𝑛),其中 𝑛 为待求凸包点集的大小,复杂度的瓶颈在于对所有点坐标的双关键字排序.
过程
首先把所有点以横坐标为第一关键字,纵坐标为第二关键字排序.
显然排序后最小的元素和最大的元素一定在凸包上.而且因为是凸多边形,我们如果从一个点出发逆时针走,轨迹总是「左拐」的,一旦出现右拐,就说明这一段不在凸包上.因此我们可以用一个单调栈来维护上下凸壳.
因为从左向右看,上下凸壳所旋转的方向不同,为了让单调栈起作用,我们首先 升序枚举 求出下凸壳,然后 降序 求出上凸壳.
求凸壳时,一旦发现即将进栈的点(𝑃)和栈顶的两个点(𝑆1,𝑆2,其中 𝑆1 为栈顶)行进的方向向右旋转,即叉积小于 0:←←←←←←→𝑆2𝑆1 ×←←←←←→𝑆1𝑃 <0,则弹出栈顶,回到上一步,继续检测,直到 ←←←←←←→𝑆2𝑆1 ×←←←←←→𝑆1𝑃 ≥0 或者栈内仅剩一个元素为止.
通常情况下不需要保留位于凸包边上的点,因此上面一段中 ←←←←←←→𝑆2𝑆1 ×←←←←←→𝑆1𝑃 <0 这个条件中的「<」可以视情况改为 ≤,同时后面一个条件应改为 >.

实现
代码实现
根据上面的代码,最后凸包上有 𝑎𝑛𝑠 个元素(额外存储了 1 号点,因此 ℎ 数组中有 𝑎𝑛𝑠 +1 个元素),并且按逆时针方向排序.周长就是
𝑎𝑛𝑠∑𝑖=1∣←←←←←←←←→ℎ𝑖ℎ𝑖+1∣Graham 扫描法
性质
与 Andrew 算法相同,Graham 扫描法的时间复杂度为 𝑂(𝑛log𝑛),复杂度瓶颈也在于对所有点排序.
过程
首先找到所有点中,纵坐标最小的一个点 𝑃.根据凸包的定义我们知道,这个点一定在凸包上.然后将所有的点以相对于点 P 的极角大小为关键字进行排序.

和 Andrew 算法类似地,我们考虑从点 𝑃 出发,在凸包上逆时针走,那么我们经过的所有节点一定都是「左拐」的.形式化地说,对于凸包逆时针方向上任意连续经过的三个点 𝑃1,𝑃2,𝑃3,一定满足 ←←←←←←→𝑃1𝑃2 ×←←←←←←→𝑃2𝑃3 ≥0.
新建一个栈用于存储凸包的信息,先将 𝑃 压入栈中,然后按照极角序依次尝试加入每一个点.如果进栈的点 𝑃0 和栈顶的两个点 𝑃1,𝑃2(其中 𝑃1 为栈顶)行进的方向「右拐」了,那么就弹出栈顶的 𝑃1,不断重复上述过程直至进栈的点与栈顶的两个点满足条件,或者栈中仅剩下一个元素,再将 𝑃0 压入栈中.


代码实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39 | struct Point {
double x, y, ang;
Point operator-(const Point& p) const { return {x - p.x, y - p.y, 0}; }
} p[MAXN];
double dis(Point p1, Point p2) {
return sqrt((p1.x - p2.x) * (p1.x - p2.x) + (p1.y - p2.y) * (p1.y - p2.y));
}
bool cmp(Point p1, Point p2) {
if (p1.ang == p2.ang) {
return dis(p1, p[1]) < dis(p2, p[1]);
}
return p1.ang < p2.ang;
}
double cross(Point p1, Point p2) { return p1.x * p2.y - p1.y * p2.x; }
int main() {
for (int i = 2; i <= n; ++i) {
if (p[i].y < p[1].y || (p[i].y == p[1].y && p[i].x < p[1].x)) {
std::swap(p[1], p[i]);
}
}
for (int i = 2; i <= n; ++i) {
p[i].ang = atan2(p[i].y - p[1].y, p[i].x - p[1].x);
}
std::sort(p + 2, p + n + 1, cmp);
sta[++top] = 1;
for (int i = 2; i <= n; ++i) {
while (top >= 2 &&
cross(p[sta[top]] - p[sta[top - 1]], p[i] - p[sta[top]]) < 0) {
top--;
}
sta[++top] = i;
}
return 0;
}
|
闵可夫斯基和
定义
点集 𝑃 和点集 𝑄 的闵可夫斯基和 𝑃 +𝑄 定义为 𝑃 +𝑄 ={𝑎 +𝑏|𝑎 ∈𝑃,𝑏 ∈𝑄},即把点集 𝑄 中的每个点看做一个向量,将点集 𝑃 中每个点沿这些向量平移,最终得到的结果的集合就是点集 𝑃 +𝑄.此处仅讨论 凸包 的闵可夫斯基和.
例如:对于点集 𝑃 ={(0,0),( −3,3),(2,1)} 和 点集 𝑄 ={(0,0),( −1,3),(1,4),(2,2)},

将 𝑃 沿 𝑄 的每个向量平移:

不难发现新图形也是一个 凸包:

性质
若点集合 𝑃,𝑄 为凸集,则其闵可夫斯基和 𝑃 +𝑄 也是凸集.
证明
设 𝑒,𝑓 ∈𝑃 +𝑄,有 𝑎,𝑏 ∈𝑃,𝑐,𝑑 ∈𝑄 且 𝑒 =𝑎 +𝑐,𝑓 =𝑏 +𝑑,则对任意 𝑡 ∈[0,1] 均有:
𝑡𝑒+(1−𝑡)𝑓=𝑡(𝑎+𝑐)+(1−𝑡)(𝑏+𝑑)=(𝑡𝑎+(1−𝑡)𝑏)+(𝑡𝑐+(1−𝑡)𝑑)∈𝑃+𝑄. 证毕.
- 若点集 𝑃,𝑄 为凸集,则其闵可夫斯基和 𝑃 +𝑄 的边集是由凸集 𝑃,𝑄 的边按极角排序后连接的结果.
证明
不妨假设凸集 𝑃 中任意一条边的斜率与 𝑄 中任意一条边的斜率均不相同.将坐标系进行旋转,使得 𝑃 上的一条边 𝑋𝑌 与 𝑥 轴平行且在最下方.
设此时 𝑄 中最低的点 𝑈,𝑃 +𝑄 的 最低 且 靠左 的点 𝐴.
可知 ⃗𝐴 =⃗𝑋 +⃗𝑈,所以 𝐴 必然在 𝑃 +𝑄 的边界上.
同理,𝑃 +𝑄 中 最低 且 靠右 的点 𝐵 有 ⃗𝐵 =⃗𝑌 +⃗𝑈,也必然在 𝑃 +𝑄 的边界上.
因此,有 ⃗𝐴𝐵 =⃗𝑋𝑌 +⃗𝑈.
若按顺序进行旋转,则结果连续的构成了 𝑃 +𝑄 中的每条边.
证毕.
实现
我们可以根据性质 2,将凸集 𝑃,𝑄 极角排序,得到它们在 𝑃 +𝑄 上的出现顺序,把 𝑃1 +𝑄1 看做 𝑃 +𝑄 的起点,然后用类似 归并 的做法依次放边即可.
时间复杂度:𝑂(𝑛 +𝑚)
实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37 | template <class T>
struct Point {
T x, y;
Point(T x = 0, T y = 0) : x(x), y(y) {}
friend Point operator+(const Point &a, const Point &b) {
return {a.x + b.x, a.y + b.y};
}
friend Point operator-(const Point &a, const Point &b) {
return {a.x - b.x, a.y - b.y};
}
// 点乘
friend T operator*(const Point &a, const Point &b) {
return a.x * b.x + a.y * b.y;
}
// 叉乘
friend T operator^(const Point &a, const Point &b) {
return a.x * b.y - a.y * b.x;
}
};
template <class T>
vector<Point<T>> minkowski_sum(vector<Point<T>> a, vector<Point<T>> b) {
vector<Point<T>> c{a[0] + b[0]};
for (usz i = 0; i + 1 < a.size(); ++i) a[i] = a[i + 1] - a[i];
for (usz i = 0; i + 1 < b.size(); ++i) b[i] = b[i + 1] - b[i];
a.pop_back(), b.pop_back();
c.resize(a.size() + b.size() + 1);
merge(a.begin(), a.end(), b.begin(), b.end(), c.begin() + 1,
[](const Point<T> &a, const Point<T> &b) { return (a ^ b) < 0; });
for (usz i = 1; i < c.size(); ++i) c[i] = c[i] + c[i - 1];
return c;
}
|
例题
例题 [JSOI2018] 战争
有两个凸包 𝑃,𝑄,平移 𝑞 次 𝑄,问每次移动后是否有交点.1 ≤𝑛,𝑚 ≤105,1 ≤𝑞 ≤105.
实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104 | #include <algorithm>
#include <cassert>
#include <cstdint>
#include <iostream>
#include <vector>
using namespace std;
using i64 = int64_t;
using isz = ptrdiff_t;
using usz = size_t;
template <class T>
struct Point {
T x, y;
Point(T x = 0, T y = 0) : x(x), y(y) {}
friend Point operator+(const Point &a, const Point &b) {
return {a.x + b.x, a.y + b.y};
}
friend Point operator-(const Point &a, const Point &b) {
return {a.x - b.x, a.y - b.y};
}
// 点乘
friend T operator*(const Point &a, const Point &b) {
return a.x * b.x + a.y * b.y;
}
// 叉乘
friend T operator^(const Point &a, const Point &b) {
return a.x * b.y - a.y * b.x;
}
friend istream &operator>>(istream &is, Point &p) { return is >> p.x >> p.y; }
};
template <class T>
vector<Point<T>> convex_hull(vector<Point<T>> p) {
assert(!p.empty());
sort(p.begin(), p.end(),
[](const Point<i64> &a, const Point<i64> &b) { return a.x < b.x; });
vector<Point<T>> u{p[0]}, d{p.back()};
for (usz i = 1; i < p.size(); ++i) {
while (u.size() >= 2 &&
((u.back() - u[u.size() - 2]) ^ (p[i] - u.back())) > 0)
u.pop_back();
u.push_back(p[i]);
}
for (usz i = p.size() - 2; (isz)i >= 0; --i) {
while (d.size() >= 2 &&
((d.back() - d[d.size() - 2]) ^ (p[i] - d.back())) > 0)
d.pop_back();
d.push_back(p[i]);
}
u.insert(u.end(), d.begin() + 1, d.end());
return u;
}
template <class T>
vector<Point<T>> minkowski_sum(vector<Point<T>> a, vector<Point<T>> b) {
vector<Point<T>> c{a[0] + b[0]};
for (usz i = 0; i + 1 < a.size(); ++i) a[i] = a[i + 1] - a[i];
for (usz i = 0; i + 1 < b.size(); ++i) b[i] = b[i + 1] - b[i];
a.pop_back(), b.pop_back();
c.resize(a.size() + b.size() + 1);
merge(a.begin(), a.end(), b.begin(), b.end(), c.begin() + 1,
[](const Point<T> &a, const Point<T> &b) { return (a ^ b) < 0; });
for (usz i = 1; i < c.size(); ++i) c[i] = c[i] + c[i - 1];
return c;
}
int main() {
cin.tie(nullptr)->sync_with_stdio(false);
uint32_t n, m, q;
vector<Point<i64>> a, b;
cin >> n >> m >> q;
a.resize(n), b.resize(m);
for (auto &p : a) cin >> p;
for (auto &p : b) cin >> p, p = 0 - p;
a = convex_hull(a), b = convex_hull(b);
a = minkowski_sum(a, b);
a.pop_back();
for (usz i = 1; i < a.size(); ++i) a[i] = a[i] - a[0];
while (q--) {
Point<i64> v;
cin >> v;
v = v - a[0];
if (v.x < 0) {
cout << "0\n";
continue;
}
auto it = upper_bound(
a.begin() + 1, a.end(), v,
[](const Point<i64> &a, const Point<i64> &b) { return (a ^ b) < 0; });
if (it == a.begin() + 1 || it == a.end()) {
cout << "0\n";
continue;
}
i64 s0 = *it ^ *prev(it), s1 = v ^ *prev(it), s2 = *it ^ v;
cout << (s1 >= 0 && s2 >= 0 && s1 + s2 <= s0) << '\n';
}
return 0;
}
|
三维凸包
基础知识
圆的反演:反演中心为 𝑂,反演半径为 𝑅,若经过 𝑂 的直线经过 𝑃,𝑃′,且 𝑂𝑃 ×𝑂𝑃′ =𝑅2,则称 𝑃、𝑃′ 关于 𝑂 互为反演.
过程
求凸包的过程如下:
- 首先对其微小扰动,避免出现四点共面的情况.
- 对于一个已知凸包,新增一个点 𝑃,将 𝑃 视作一个点光源,向凸包做射线,可以知道,光线的可见面和不可见面一定是由若干条棱隔开的.
- 将光的可见面删去,并新增由其分割棱与 𝑃 构成的平面. 重复此过程即可,由 Pick 定理、欧拉公式(在凸多面体中,其顶点 𝑉、边数 𝐸 及面数 𝐹 满足 𝑉 −𝐸 +𝐹 =2)和圆的反演,复杂度 𝑂(𝑛2).
模板题
P4724【模板】三维凸包
重复上述过程即可得到答案.
代码实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81 | #include <cmath>
#include <cstdlib>
#include <iomanip>
#include <iostream>
using namespace std;
constexpr int N = 2010;
constexpr double eps = 1e-9;
int n, cnt, vis[N][N];
double ans;
double Rand() { return rand() / (double)RAND_MAX; }
double reps() { return (Rand() - 0.5) * eps; }
struct Node {
double x, y, z;
void shake() {
x += reps();
y += reps();
z += reps();
}
double len() { return sqrt(x * x + y * y + z * z); }
Node operator-(Node A) const { return {x - A.x, y - A.y, z - A.z}; }
Node operator*(Node A) const {
return {y * A.z - z * A.y, z * A.x - x * A.z, x * A.y - y * A.x};
}
double operator&(Node A) const { return x * A.x + y * A.y + z * A.z; }
} A[N];
struct Face {
int v[3];
Node Normal() { return (A[v[1]] - A[v[0]]) * (A[v[2]] - A[v[0]]); }
double area() { return Normal().len() / 2.0; }
} f[N], C[N];
int see(Face a, Node b) { return ((b - A[a.v[0]]) & a.Normal()) > 0; }
void Convex_3D() {
f[++cnt] = {1, 2, 3};
f[++cnt] = {3, 2, 1};
for (int i = 4, cc = 0; i <= n; i++) {
for (int j = 1, v; j <= cnt; j++) {
if (!(v = see(f[j], A[i]))) C[++cc] = f[j];
for (int k = 0; k < 3; k++) vis[f[j].v[k]][f[j].v[(k + 1) % 3]] = v;
}
for (int j = 1; j <= cnt; j++)
for (int k = 0; k < 3; k++) {
int x = f[j].v[k], y = f[j].v[(k + 1) % 3];
if (vis[x][y] && !vis[y][x]) C[++cc] = {x, y, i};
}
for (int j = 1; j <= cc; j++) f[j] = C[j];
cnt = cc;
cc = 0;
}
}
int main() {
cin >> n;
for (int i = 1; i <= n; i++) cin >> A[i].x >> A[i].y >> A[i].z, A[i].shake();
Convex_3D();
for (int i = 1; i <= cnt; i++) ans += f[i].area();
cout << fixed << setprecision(3) << ans << '\n';
return 0;
}
|
练习
参考资料与注释
本页面最近更新:2026/6/5 12:29:31,更新历史
发现错误?想一起完善? 在 GitHub 上编辑此页!
本页面贡献者:Ir1d, H-J-Granger, StudyingFather, countercurrent-time, Enter-tainer, NachtgeistW, CCXXXI, ksyx, sshwy, Tiphereth-A, AngelKitty, c-forrest, cjsoft, diauweb, Early0v0, ezoixx130, GekkaSaori, Henry-ZHR, iamtwz, Konano, LovelyBuggies, lychees, Makkiy, mgt, minghu6, P-Y-Y, PotassiumWings, SamZhangQingChuan, Suyun514, weiyong1024, Xeonacid, xglight, AtomAlpaca, F1shAndCat, GavinZhengOI, Gesrua, gi-b716, gitbugfsj, hikariyo, kxccc, livrth, megakite, Menci, ouuan, Peanut-Tang, shawlleyw, shuzhouliu, Sshwy, SukkaW, wjy-yy
本页面的全部内容在 CC BY-SA 4.0 和 SATA 协议之条款下提供,附加条款亦可能应用